2012 Thunderchicken Robot Overview
The 2012 Thunderchicken was designed to dunk balls and to balance on top of the seesaw with alliance partner robots. There were numerous subsystems because of the diverse amount of sensory information the robot needed to receive: the Kicker Subsystem, the Tensioner Subsystem, the Arm Subsystem, the Drive Subsystem and the Camera Subsystem. All aspects of the robot required manual commands, with the exception of the camera and the autonomous commands used during teleop and autonomous mode in the tournament.
Hardware and Software Design
>>Subsystem Design
Kicker Subsystem
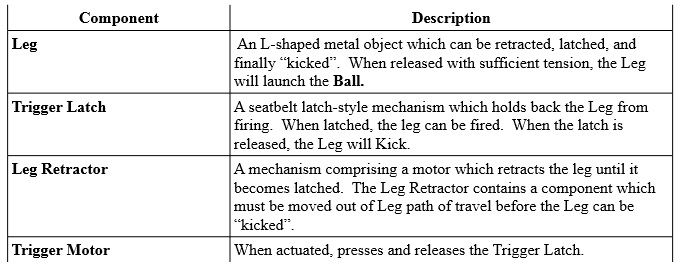
Tensioner Subsystem

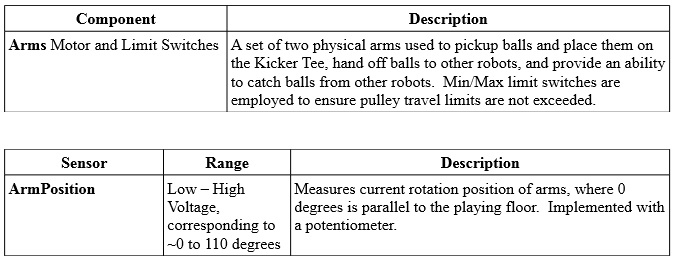
Arm Subsystem
Drive Subsystem

Camera Subsystem
