2010 Thunderchicken Robot Overview
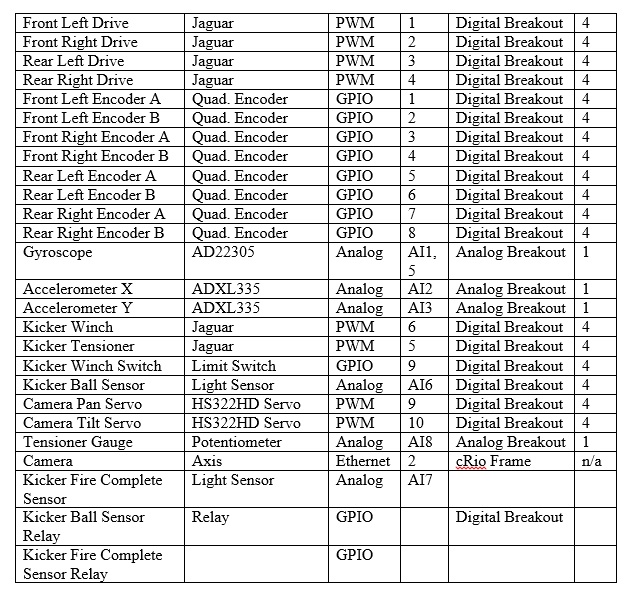
 Built to play soccer, the 2010 Thunderchicken had a kicker, a camera, a tensioner, and an auto rotate feature. This was the first year that the team implemented mecanum drive as well as the vision-to-processing feature. The robot was also equipped with a simple gyroscope, vision-to-processing that supported the auto rotate-to-target feature, and a ball detector composed of two limit switches. The chassis was designed in such a way that we could drive over soccer balls to pick them up and drive over the two 18-inch barriers separating the field.
Built to play soccer, the 2010 Thunderchicken had a kicker, a camera, a tensioner, and an auto rotate feature. This was the first year that the team implemented mecanum drive as well as the vision-to-processing feature. The robot was also equipped with a simple gyroscope, vision-to-processing that supported the auto rotate-to-target feature, and a ball detector composed of two limit switches. The chassis was designed in such a way that we could drive over soccer balls to pick them up and drive over the two 18-inch barriers separating the field.
Hardware Design
>> Machine Shop Overview
Software Design
>> Complete Account
>> Material List